|
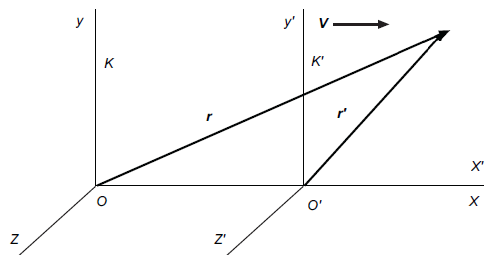
Para construir ese diagrama doble, se tiene en cuenta,
en primer lugar, que la historia del origen O' del SRI K' es
(según el punto de vista del sistema de referencia
inercial K) el eje de tiempos ct'. Ello es así porque dicho origen O' está, para todo
tiempo t', en la posición x' = 0.
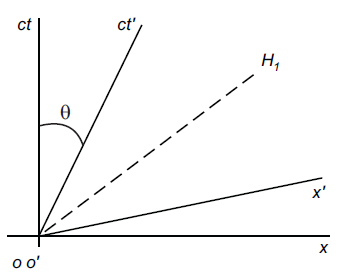
Una vez dibujado ese eje
temporal ct', se utiliza el hecho de que la luz tiene la
misma velocidad, c, en ambos sistemas de
referencia para añadir al diagrama
el eje espacial x'. Un haz de luz que se emita desde el
origen común justamente en el
instante t = t' = 0 en el que coinciden ambos orígenes,
x = x '= 0, tiene la velocidad, c, en los dos
referenciales. Por tanto, el
eje espacial x' ha de ser simétrico al eje temporal
ct',
para que el extremo del haz de luz, H1, sea la bisectriz
del diagrama respecto de los ejes de ambos sistemas de
referencia inerciales.
Quedando, por tanto,
dibujado finalmente el diagrama doble (que da
los puntos de vista de los dos SRI, K y K') tal
como se muestra en la figura adjunta, situada a
la derecha. |
|
 |